Robot gliders cruise the currents
Autonomous underwater gliders are ingenious and hardy robots that make continuous long-term oceanographic measurements. On this voyage, we’ve released three of them into the high-energy wilds of the Antarctic Circumpolar Current, halfway between Tasmania and Antarctica.
Travelling up and down through the water column to a depth of 1000m, the gliders can move against and across the current. This enables them to detail the finer-scale structures of the eddies and filaments spinning off the main current. We’re planning to zig-zag them back and forth across the trajectories of the Argo floats we’ve also deployed, for a greater understanding of the gradients the floats are measuring.
But the gliders are not powered by a propeller, or any propulsion for that matter – they use small changes in buoyancy to move up and down through current flows. By pumping a fluid (in this case, oil) from an internal reservoir to an external flexible bladder, a glider increases its volume without changing mass and therefore decreases its density.
Pumping oil in and out of the bladder makes the glider alternately lighter and denser than the surrounding water. It travels up and down in a saw-tooth pattern, sinking to a pre-programmed depth before floating back to the surface. The attitude of the glider is controlled by shifting the centre of gravity, that is, adjusting the position of the battery.
At the surface, the gliders transmit data and receive piloting instructions via satellite. One glider belongs to CSIRO and two to the California Institute of Technology (Caltech). Teams of pilots in Hobart (CSIRO), Pasadena (Caltech) and Providence, Rhode Island (Brown University) will manage the gliders for six months.
Yue (Luna) Bai from Caltech is on board CSIRO research vessel (RV) Investigator to oversee the glider deployments and act as the crucial communications link between the pilot teams and the field team.
She’s also a member of one of the CTD sampling teams on the ship, and loves how autonomous gliders make underwater data collection easier.
“To get underwater data we literally have to do the CTD on a ship every couple of hours and everybody has to sample it.”
“Imagine just typing in your laptop and getting this awesome underwater data directly to your office. Gliders enable us to do just that,” said Luna.
Depending on their battery life, gliders can travel about 6000 kilometres and stay at sea for 6 to 10 months. This means a glider we deploy in the middle of the Southern Ocean can be piloted all the way back to Hobart.
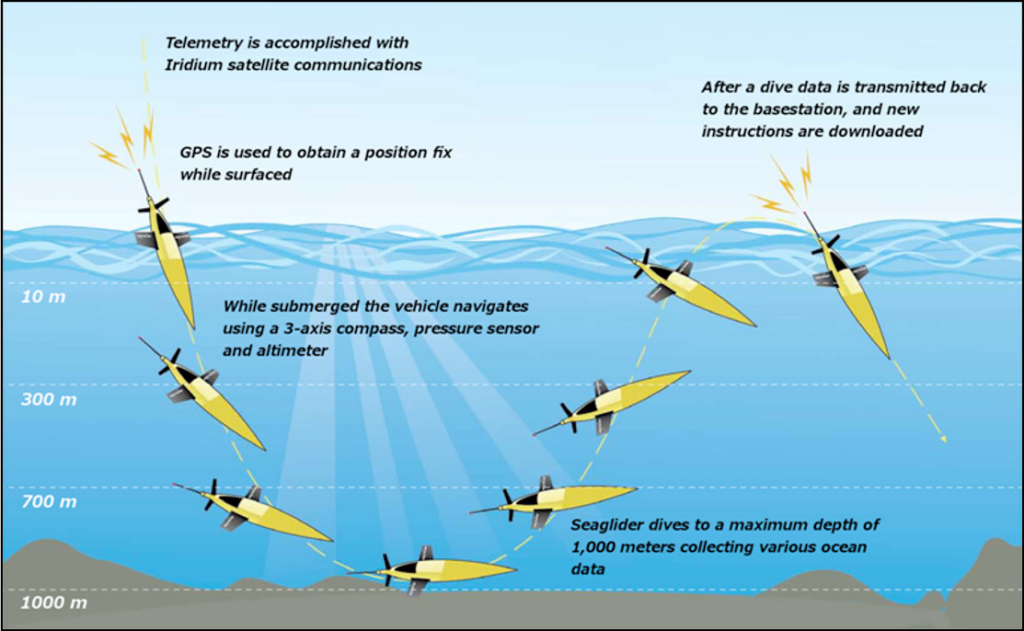
The glider establishes communications with the shore station over an Iridium satellite link each time it surfaces. This allows the pilot to monitor progress, check the state of critical systems such as battery level and make changes to the mission course. The glider navigates by taking a GPS fix at each surface visit and recalculating the course to its next waypoint, along with internal sensors that monitor its heading, depth and attitude during dives.
The glider sends back data from its sensors, almost in real time. Measurements include conductivity (salinity), temperature, depth, fluorescence (chlorophyll) and oxygen.
The slow steady way a glider flies underwater enables continuous profiles from 1000m to within a couple of metres of the surface, without disturbing the structure of what it is measuring.
In addition to the floats, drifters, Triaxus and SWOT satellite, these gliders are ideal for our detailed observations of the Antarctic Circumpolar Current as they give us targeted data over space and time and we can steer them towards any interesting oceanographic features encountered along the way.

Luna makes final checks on a Caltech glider before deployment (photo: Amelia Pearson) 
With the hatch removed, the oil bladder is visible (photo: Mark Horstman) 
Tim Lane and Jim LaDuke do final assembly (photo: Amelia Pearson) 
The deck crew prepare for launch (photo: Amelia Pearson) 
Glider is hoisted into the water (photo: Amelia Pearson) 
Released into the wild (photo: Amelia Pearson)
This research is supported by a grant of sea time on RV Investigator from the CSIRO Marine National Facility which is supported by the Australian Government’s National Collaborative Research Infrastructure Strategy (NCRIS).


